Welcome to InformatikumTalk! Engage and share your thoughts with others.
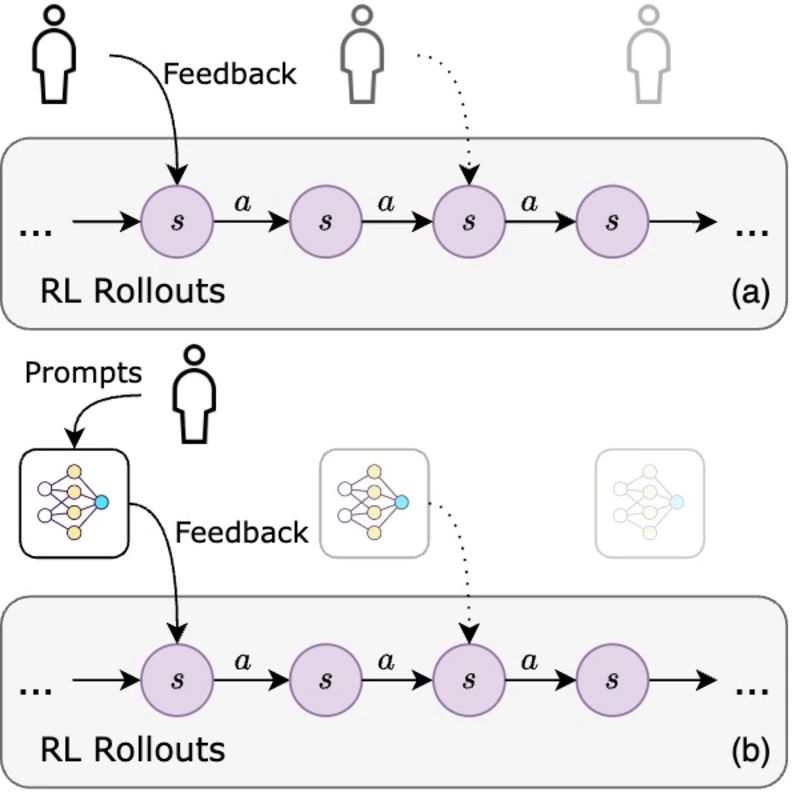
[003] Accelerating Reinforcement Learning of Robotic Manipulations via Feedback from Large Language Models
Abstract Reinforcement Learning (RL) plays an important role in the robotic manipulation domain since it allows self-learning from trial-and-error interactions with the environment. Still, sample efficiency and reward specification seriously limit its potential. One possible solution involves learning from expert guidance. However, obtaining a human expert is impractical due to the high cost of supervising an RL agent, and developing an automatic supervisor is a challenging endeavor. Large Language Models (LLMs) demonstrate remarkable abilities to provide human-like feedback on user inputs in natural language....
[002] Multi-modal Sequential Learning for Peg in Multi Hole Assembly
Time, Location (UTC +01:00) Europe/Berlin, 05 Nov 2023, 17:00-18:00 Informatikum WTM group, F-229; and online Add to calendar Speaker: 刘鑫宇 See also:
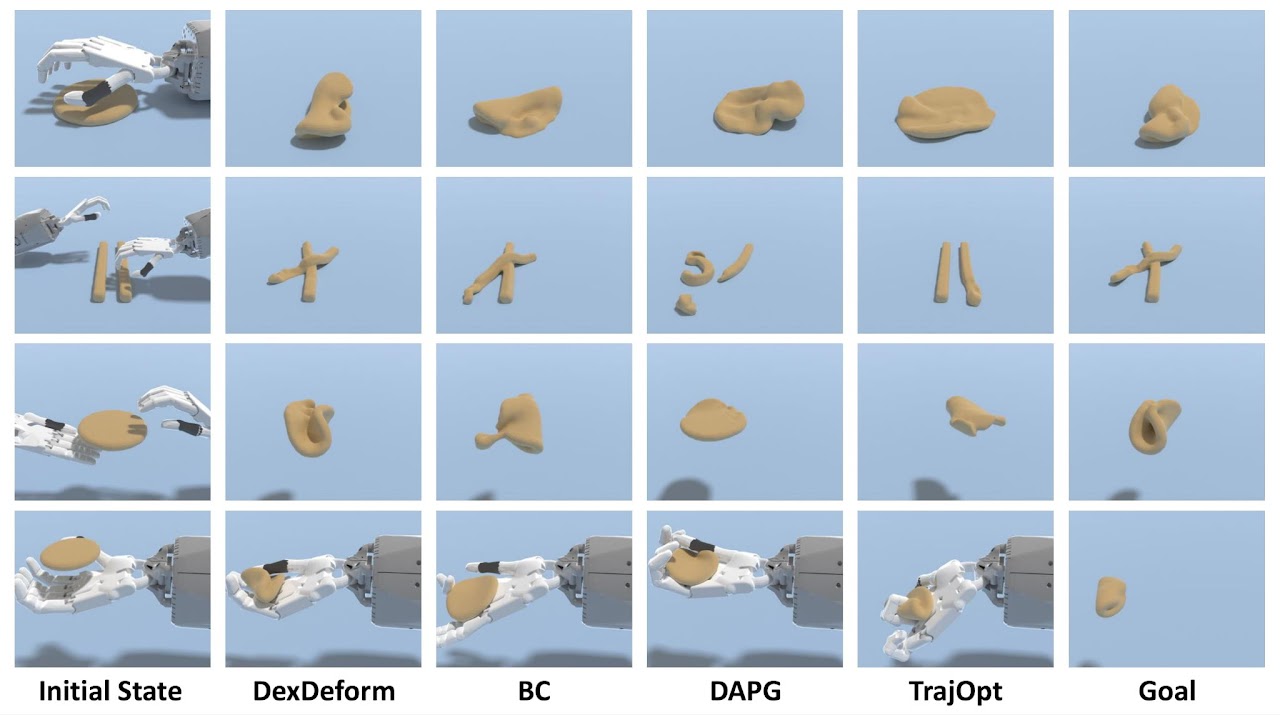
[001] DexDeform: Dexterous Deformable Object Manipulation with Human Demonstrations and Differentiable Physics
Time, Location (UTC +02:00) Europe/Berlin, 29 Oct 2023, 17:00-18:00 Informatikum WTM group, F-229; and online Add to calendar Speaker: Yunlong Wang See also: project webpage this arXiv link for the preprint
[000] How to Contribute?
How to Join Time: (UTC +01:00) Europe/Berlin, Sunday, 17:00-18:00 Location: Join online with Zoom link, or offline in F-229, Informatikum. How to Update this Website with New Entry This webpage is powered by Github pages. Any changes will be done within this github repository. Feel free to fork and create PR to update. If you are already a collaborator, you can directly update the content in-position. git clone <THIS_REPO> cd <THIS_repo> cd content/talks Under content/talks folder create a new directory with index....